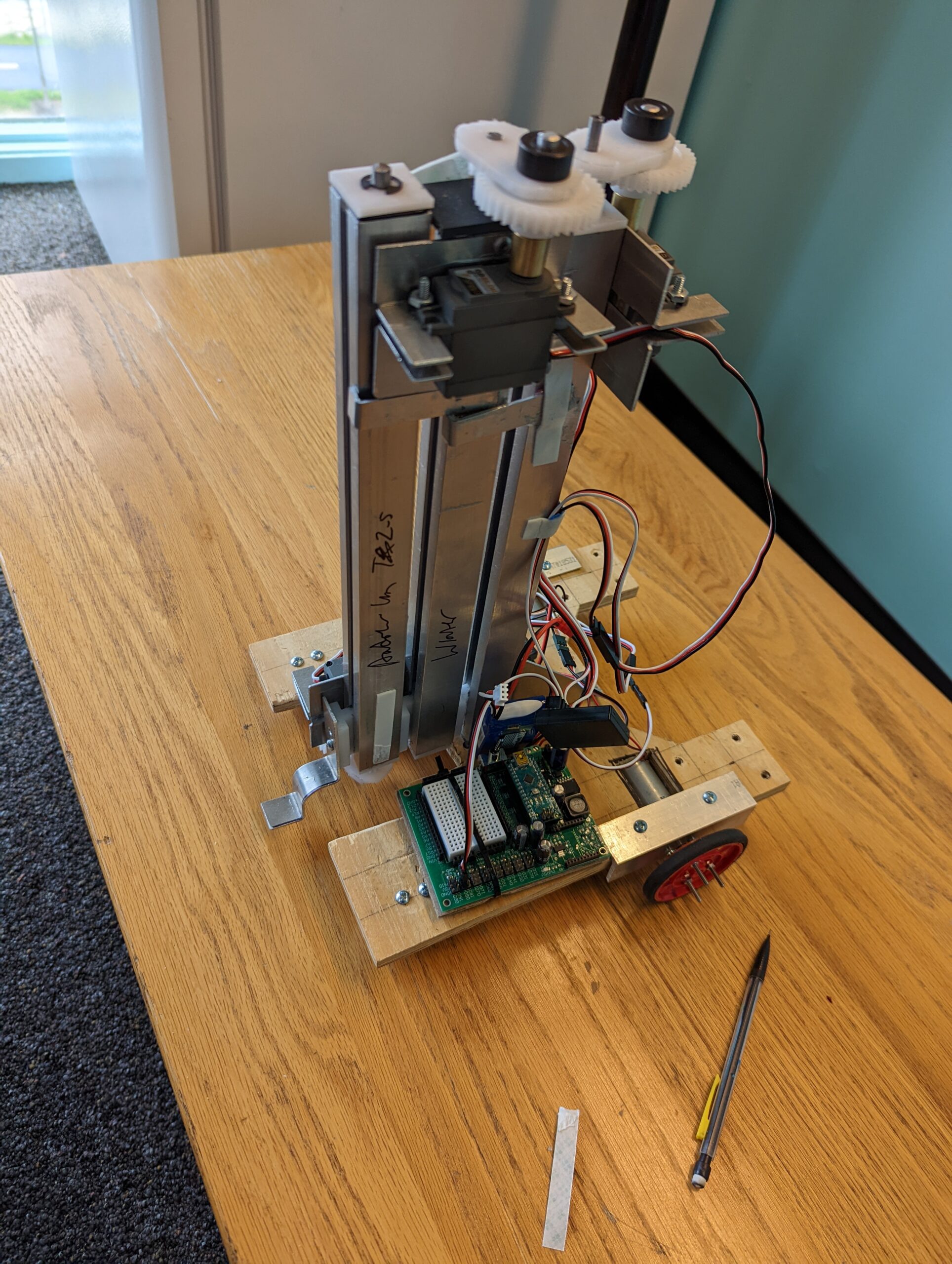
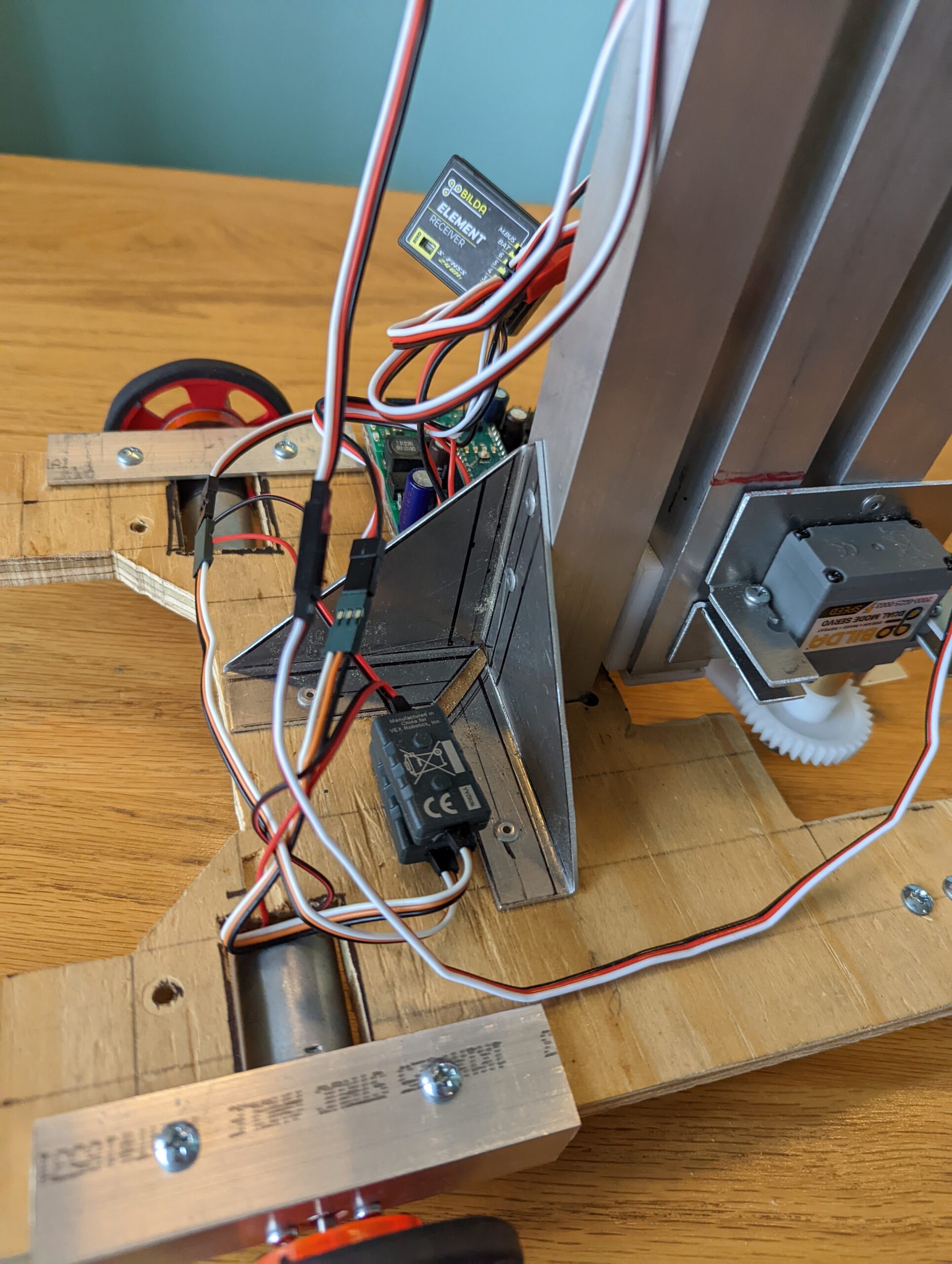
As part of a class wide competition, students were tasked with completing various tasks on a game board to score points. After making various proof of concept mechanisms for different tasks, I decided to concentrate on one focused on pushing a beaver model up a pole as high up as possible. I designed a robot with a three stage lead screw mechanism capable of extending 1 m high within 90 seconds and being controlled remotely. (Very inefficient method of vertical translation but I really liked lead screws at the time)